人間行動観察学習型ロボット
既に「踊る民謡ロボット」を文化遺産保護プロジェクトのところで紹介したが、池内研ではそれとは異なるロボットの研究も行っている。
人間行動観察学習型ロボットとはその名の通り、人間の行動を目で見て観察し、その行動の意味を理解し、真似て同じ行動をすることができるロボットのことを言う。ここでは、ロボットの一例として以下に「ドットちゃん」を紹介する。「目で見て、人間の行動を観察し、学習することによって、人間に指示されなくても人間の行動を手助けしていく」ことが期待されている。
倒れない動きの研究
何かにつまずいたとき、不意に後ろから押されたとき、電車に乗っていて急ブレーキがかかったとき、自分がどのような行動を取るであろうか想像していただきたい。ここで、足を前にだして踏ん張る方法は人間にしかできないので考慮に入れないでほしい。おそらく私は、思い切り腕を回しながら転ばないように必死でバランスを取るだろう。
この、「腕を回す」という行動が、倒れないために最も効率の良い方法であるということがわかった。これは角運動量保存則(力のモーメント。回転のエネルギーを考える。)で考えても理にかなった行動である。実際に、何人かに実験台になっていただき、マットの前で、いきなり後ろから押されたときにどのような反応をするのかをモーションキャプチャをつけて分析したそうだ。このとき押す力の大きさは、力積をあらかじめ計算しておくことによって、足を地面から離さないで対応できる大きさにしてある。数人のデータ計り平均をとることによって「倒れない動き」をモデル化することができる。このようにして、「腕回し」の行動が見つかったのである。
ドットちゃん(人間行動観察学習型ロボット)
ドットちゃんとは?
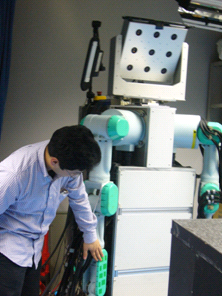 写真13 ドットちゃん
写真13 ドットちゃん
上部が顔であるが、9つの点があるのが見える。これは、このロボット(通称ドットちゃん。この点に由来する名前だそうだ。)の「目」である。なぜ目が9つもあるのかというと、立体視させるためである。人間の目は、意識せずとも両目で遠近をはかっている。これが立体視で、より距離感を正確に出すために、ドットちゃんには9つのレンズが目として備わっているのだ。
次に、ドットちゃんの手を見てみよう。

世界でも珍しい、多指ロボットである。右手に4本、左手に3本の指がついている。また、手には力センサがたくさんつけられていて、モノを握ることができる。まず人間が、センサ付きの手袋をはめていろいろなものを握り、モノとの接触状態を検出し、そのデータをロボットに組み込むのだ。
また、ドットちゃんはロボットには難しいと言われるひも結びにも挑戦している。実際、ロボットの「ひも」は太くて、我々にとっての「綱」である。ロボットのひも結びは「結び目理論(詳細はこちら)」という数学の理論と、結び目理論に基づいて、ひも結びのために池内研が独自に提案した「Pデータ」というデータ構造を使って、実現させる研究がいま行われている。
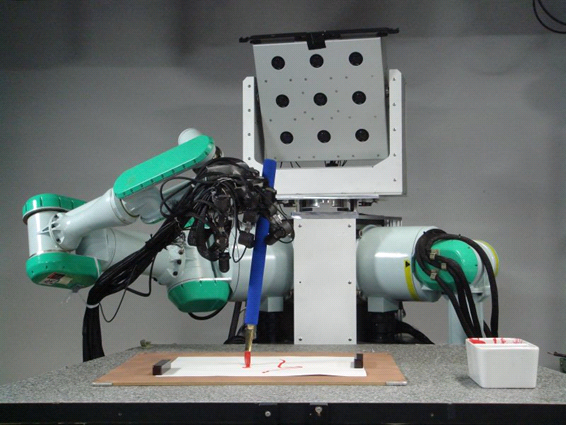
最後に、ドットちゃんの新たなる挑戦を紹介しよう。工藤さんに「ドットちゃんは絵を描くんだよ」といわれ、半信半疑ながらも絵を見せてもらった。ティンカーベルの絵だ。残念ながら、まだ開発段階の研究のため実際に描いた絵はここに掲載できないが、近いうちに発表される研究成果が楽しみだ。写真は、ドットちゃんが絵を描いているところである。
私はそのティンカーベルの絵を見て、正直最初は何が描かれているのかよくわからなかった。しかし、よく見ると、ティンカーベルの形をデータ化して描いているだけあって、確かに輪郭をかたどっている。ティンカーベルの形で押さえるべきところがきちんと押さえられているのだ。絵の不得意な私では、全体の形をあのようにきれいに輪郭をとらえることは難しい。どのような筆で描いているのかというと、フィルムケースくらいありそうな太い筆だ。スケールがすべて大きい。
ロボットは筆先の紙への接触をどう判断するのか。それは、ロボットの指先につけられた力センサで指先に加わる力を計測することで接触が判断できる。また、絵を描く上では曲線が非常に難しい。なぜなら筆先はペンと違い柔軟に変形するので、描いているうちに最初に想定したものとは違う形状になってしまうのだ。それにより、計画されていたのとは違う線が引けてしまう。このずれをうまく制御するのが難しい。また、筆先の変形によって引き起こされる予定外の現象として、手が動いていても筆先が動かない、といったことがある。
しかし、改良を加えることによって、どんどん正確な絵を描けるようになってきている。一番新しい時期に描かれた絵も見せていただいたが、最初の絵よりは格段に形がわかるようになっていた。進歩はめざましい。今後の新しい成果の発表に注目していきたい。

準備中